
Jack je ergonomický nástroj, ktorý nám dovoľuje vytvoriť, konkrétne pracovné prostredie, vložiť do tohto prostredia antropometricky a biomechanicky presný model človeka. Tento model je v posledných verziách softvéru už s elastickou kožou, takže verne napodobuje výzor človeka. Model môžeme nastaviť do určitej pracovnej polohy na základe pracovného postupu a následne analyzovať fyzickú záťaž na základe definovaného zaťaženia. V programe dokážeme hodnotiť dosahové zóny, zorné pole, detekovať kolízie. Zároveň je možné realizovať najpoužívanejšie ergonomické analýzy ako RULA, OWAS, NIOSH, MTM, Low Back Analysis a ďalšie.

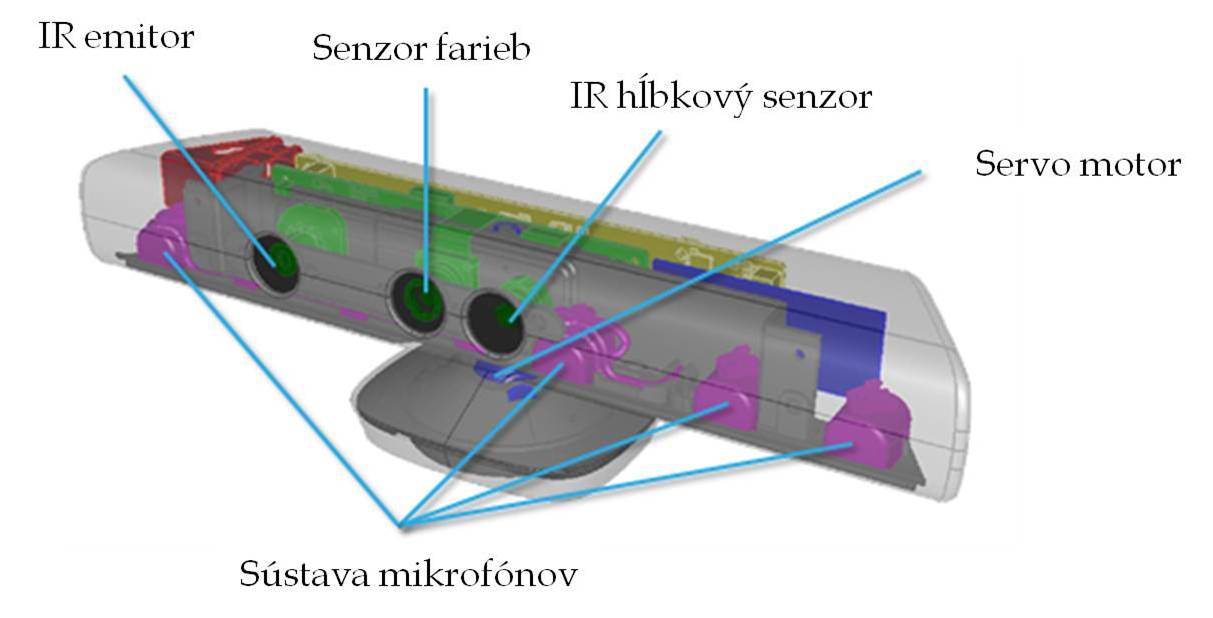
Väčšina analýz podporuje hodnotenie operátora aj dynamicky. Pohyby je možné vytvárať v tomto softvéri viacerými metódami. Dve metódy sú ručné, kde sa zadávajú konkrétne pohyby a čas kedy má konkrétny operátor pohyb vykonať. Existuje aj možnosť prepojenia softvéru na zariadenia Motion Capture. Pre zaznamenávanie pohybov je možné využiť dátový oblek čo je finančne veľmi náročná záležitosť, alebo najnovšie je možné využiť senzor Kinect.

Prepojenie Jack a Kinect
Softvér Jack je otvorený softvér, čiže užívatelia si môžu doprogramovať vlastné plug-iny a tak doplniť rôzne funkcionality. Spoločnosť Siemens PLM Software krátko po uvedení zariadenia Microsoft Kinect na trh uvoľnila pre svojich užívateľov plug-iny na prepojenie tohto senzoru so softvérmi Jack a Process Simulate. Po nainštalovaní tohto plug-inu a jeho spustení v prostredí Jack (je potrebné mať aktívny senzor Kinect) sa nám načíta nové okno so základnými funkciami.
Plug-in obsahuje aj hlasové ovládanie, takže väčšinu povelov je možné vykonávať iba prostredníctvom hlasových povelov. Takýmto spôsobom je možné aktivovať jeden z dvoch hlavných módov, vybrať konkrétneho operátora, uložiť pracovnú polohu alebo presunúť prípadne pootočiť figurínu.
Plug-in má dva základné módy:
1. Exploration mode – je zameraný na prehliadku 3D prostredia. Vyberieme si konkrétneho pracovníka a po jeho aktivácií si môžeme „preletom“ prehliadať pracovné prostredie. Pohyb figuríny ovládane prostredníctvom rúk. Jednou rukou riadime pohyb doprava a doľava a druhou rukou zasa pohyb nahor a nadol.
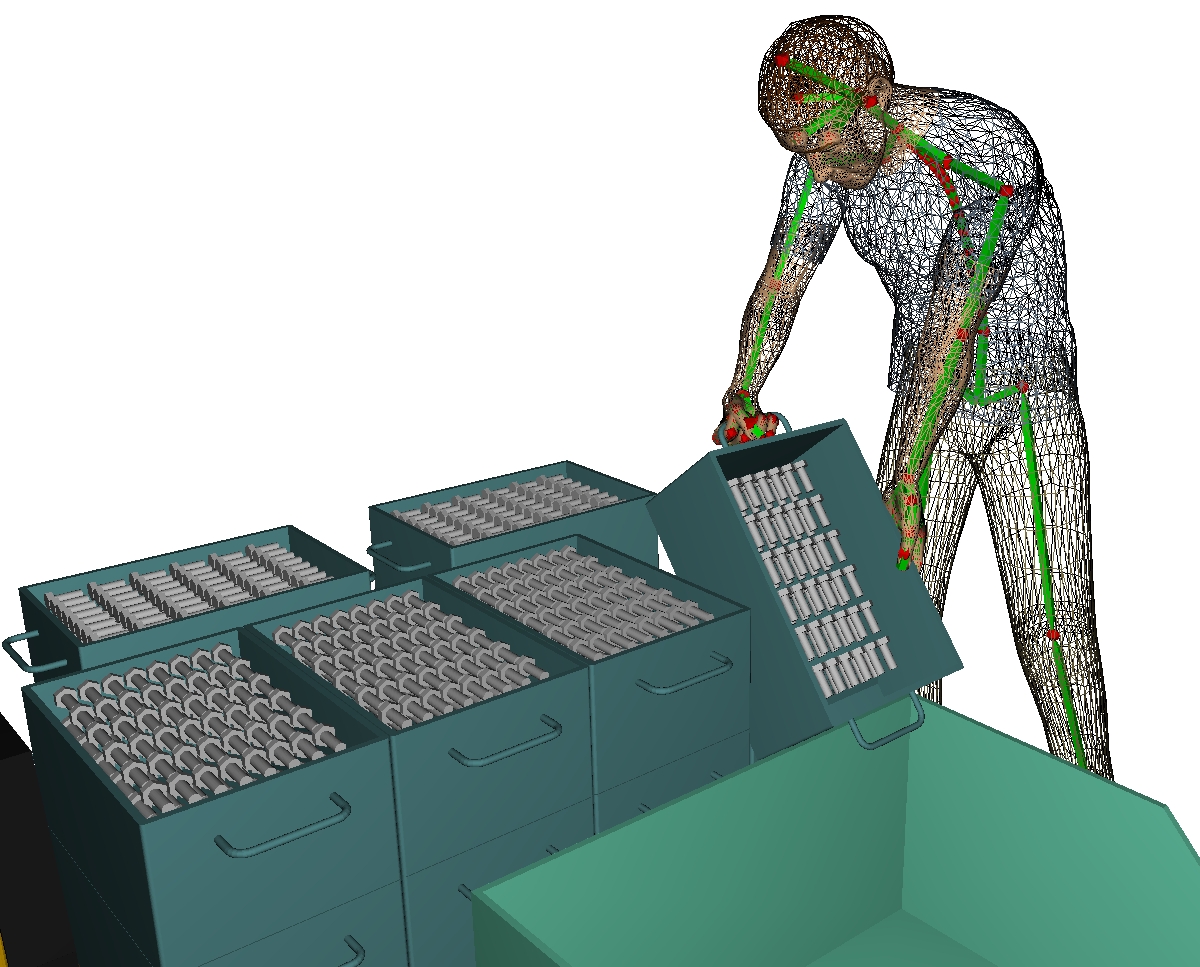
2. Posture mode – Kinect vďaka body-trackingu rozpoznáva jednotlivé končatiny postavy v zornom poli a tieto sú prenášané na vybranú figurínu v prostredí Jack. Figurína človeka v softvéri má 69 kĺbových spojení. Konkrétna pracovná poloha sa dá nastaviť až po končeky prstov. Plug-in však pre nastavenie konkrétnej pracovnej polohy v súčasnosti dokáže meniť nastavenia 20 kĺbových spojení. V súčasnosti nie je možné týmto spôsobom sledovať pohyby prstov. Kĺbové spojenia sú využívané z takzvaného skeletu, ktorý obsahuje figurína. Namodelované pracovné polohy je možné uložiť do knižnice polôh a spätne ich priradiť operátorovi a vyhodnotiť zaťaženie. Druhou možnosťou je aktivovať konkrétnu analýzu a hodnotiť zaťaženie operátora dynamicky počas celého pracovného úkonu. Súčasná verzia plug-inu však neumožňuje zachytiť tento pohyb a spätne ho prehrať ako u obleku Motion Capture. Výhodou takéhoto vytvárania pohybov je časová nenáročnosť, nevýhodou je nižšia presnosť namodelovania pracovnej polohy, keďže je využívaných iba 20 kĺbových spojení. Na nasledovných videách môžete vidieť niekoľko reálnych ukážok prepojenia spomínaných technológií.
Na prvom videu môžete vidieť ukážku oboch modulov Kinect plug-inu. Prvý umožňuje virtuálnu prehliadku pracovného prostredia a druhý simuláciu pracovných úkonov na konkrétnom pracovisku. Počas vytvárania jednotlivých pracovných polôh je možné aktivovať aj analýzy zaťaženia operátora, ktoré graficky vizualizujú jeho okamžité fyzické zaťaženie.
Na tomto videu môžeme vidieť aj reálne pohyby človeka snímaného senzorom Kinect a okamžité prenášanie jeho pohybov do virtuálneho prostredia. Pohyby a virtuálne pracovné prostredie je možné zobrazovať prostredníctvom monitora, projektora, 3D projektora, prípadne rôznych riešení pre zobrazovanie virtuálnej reality, napr. Cave.